
|
|
DT Receiver - Rx41d-3-v503 - Instructions
|
|

|

|
1. DEFAULT SETUP
- Car with center off motor control using Channel 3. This is intended for 'joystick' transmitters.
- Steering with Servo, 2-actuator or 2-muscle wire.
- Driving and brake lights
- All outputs can be customised / re-configured.
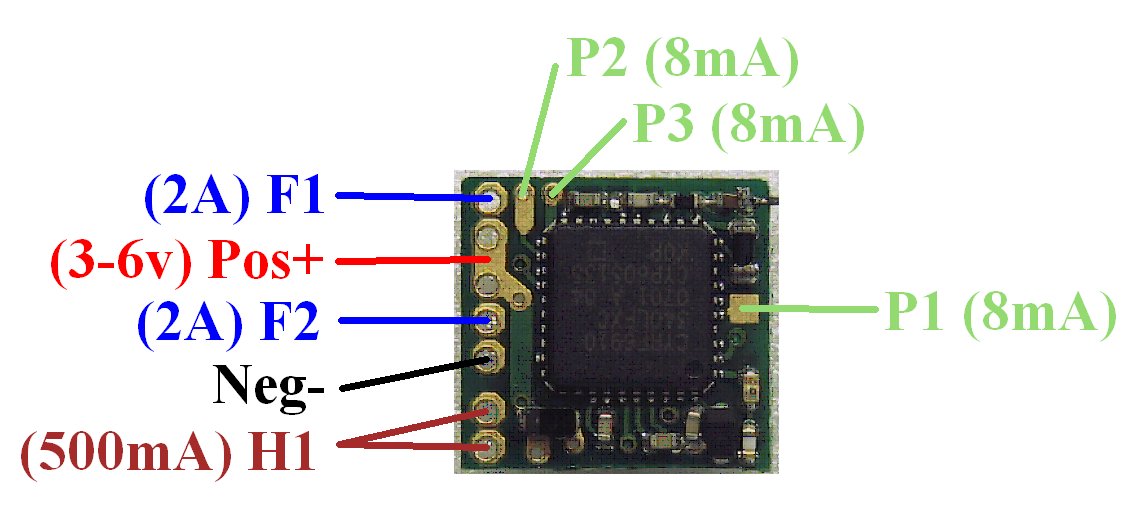
| Output | Type | Channel | Other |
| H1: | Motor 'center off' control | Ch3 |
700Hz PWM frequency 0.5A max stall current |
| F1: | 2-coil actuator / muscle wire / ADD1 | Ch4 steering |
. |
| F2: | 2-coil actuator / muscle wire / ADD1 | Ch4 steering |
. |
| P1: | Servo |
Ch4 steering |
. |
| P2: | On/Off light | Ch2 |
Right >2s = toggle On/Off P2 is also set up as 'LED2' Led needs current limiting resistor |
| P3: | Brake Led | Ch3 |
Automatic Led needs current limiting resistor |
| Arming/Activation: | Mid-stick to enable | Ch3 | . |
| LVC |
Mid-stick to acknowledge |
Ch3 | 'LED2' 2-flash if triggered |
| LED2 | External LED | P2 | Shows useful receiver activity |
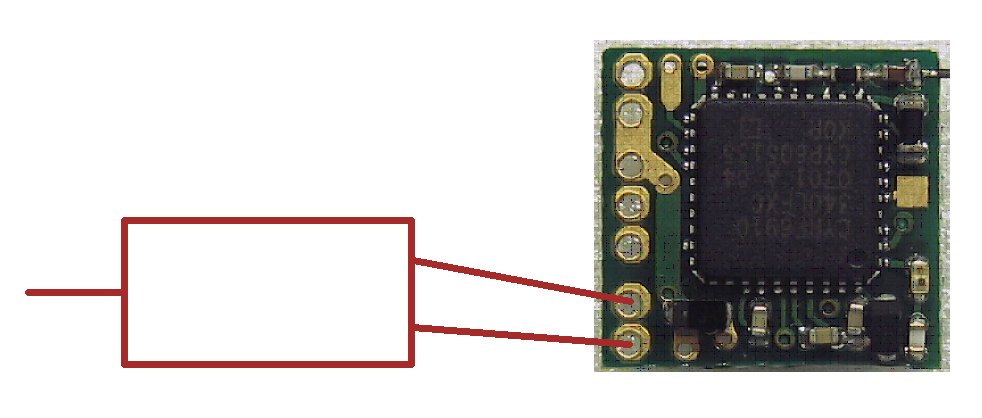
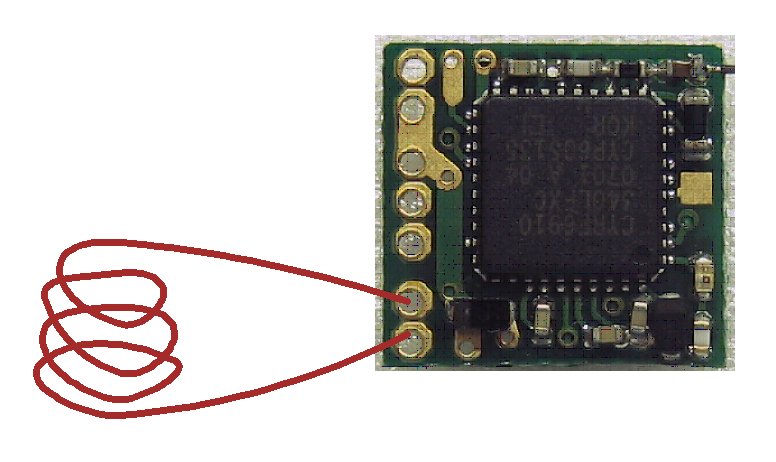
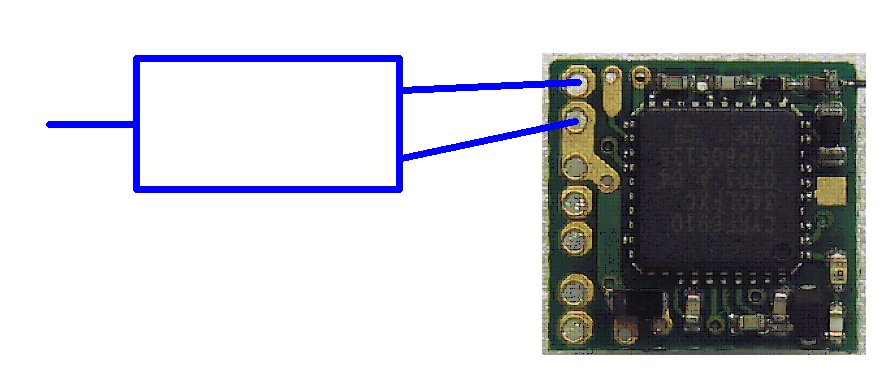
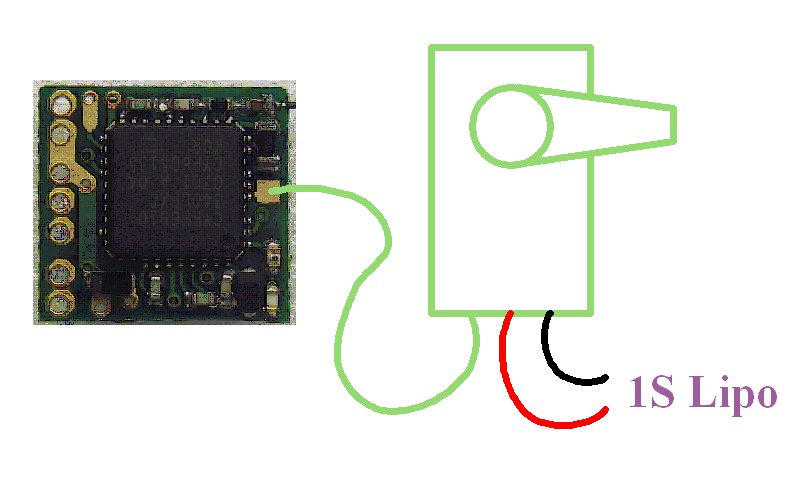
2. EXAMPLE CONNECTIONS:
|
|
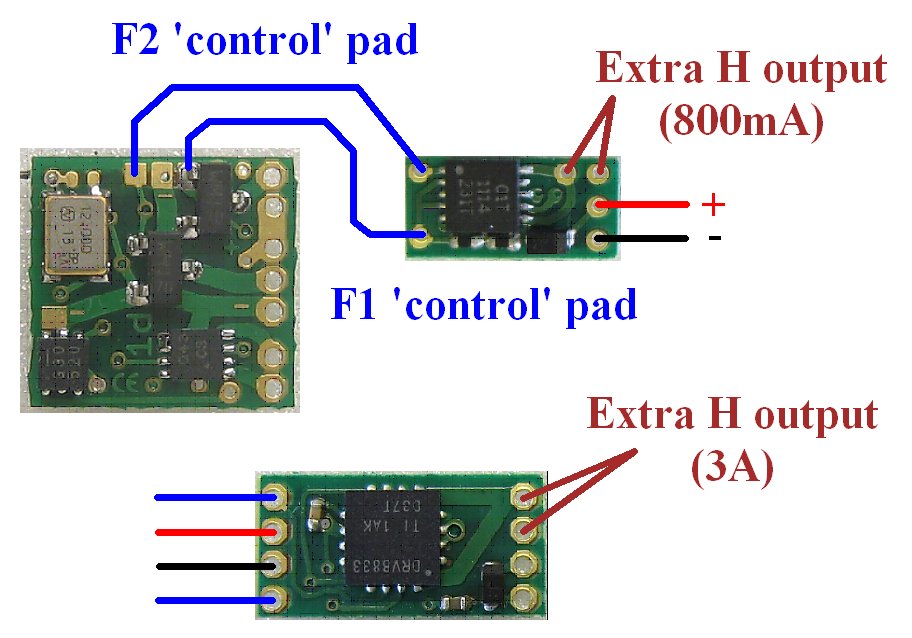
for extra H output |
|
|
|
|
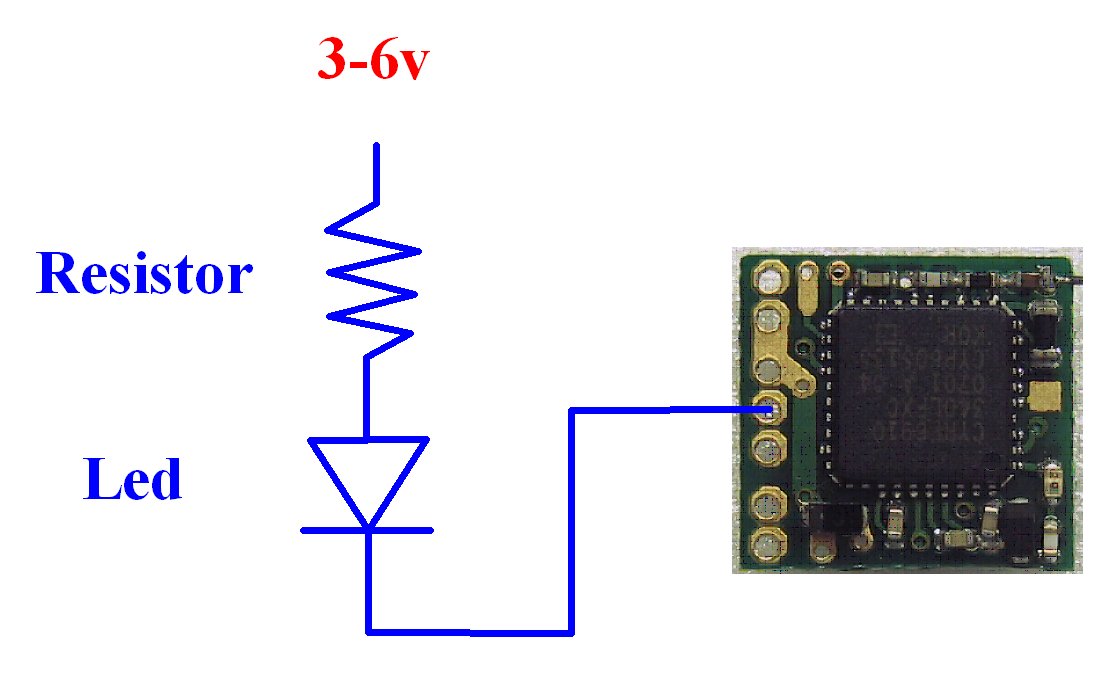
LEDs with 1S Lipo:
Led's driven from P outputs only require a current limiting resistor (8mA max).
Led's driven from F outputs only require a current limiting resistor (2A max).
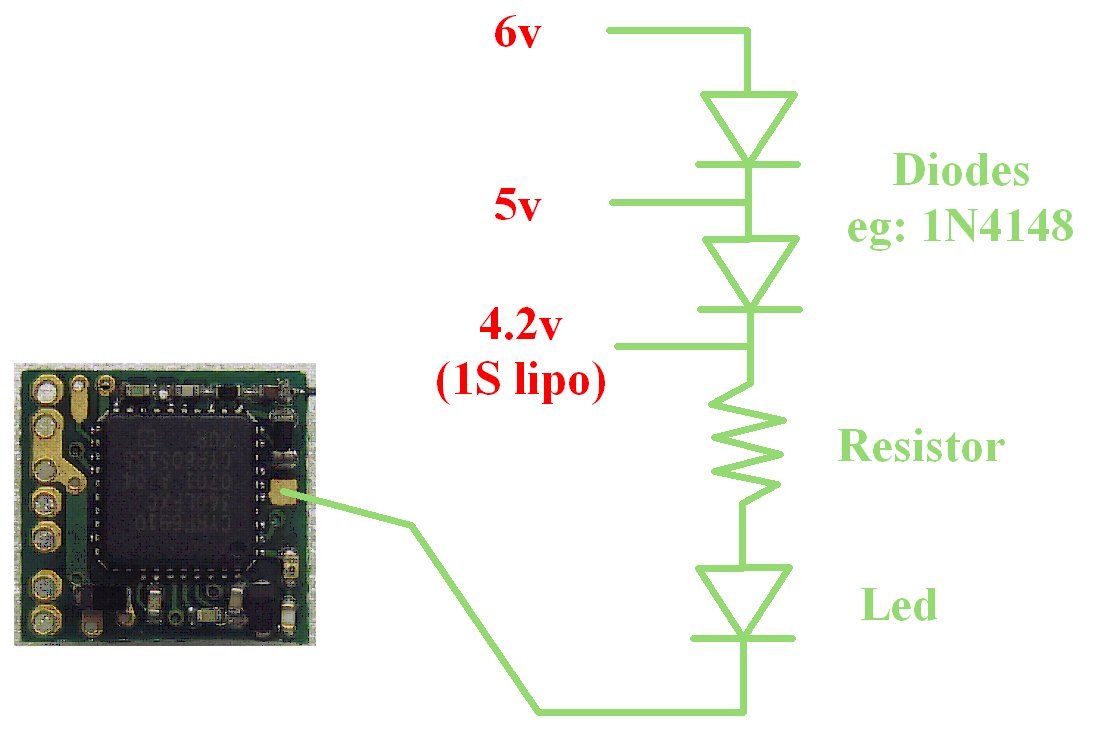
LEDs with 5-6v:
'P' outputs are 3v when 'off' and 0v when 'on'. So when used with higher voltages, the leds driven from P outputs also need diodes to reduce the voltage. This is because 5 or 6v is high enough above the 3v output to make Leds conduct even when P outputs are 'off'. An example is shown in the Led (P1) diagram.
Led's driven from F outputs only require a current limiting resistor when operated off any voltage up to 6v.
GRAIN of RICE/WHEAT:
These bulbs usually draw >8mA so are not suitable for use with P outputs (unless buffered with a transistor).
These bulbs can be driven from F outputs. F outputs allow the intensity to be varied with stick movement or 'Travel Adjust'.
3. CHANGING OUTPUTS:
4. GENERAL:
The Rx is not insulated.
The PCB is thin so do not bend it.
5. LED:
Led On = perfect reception (real-time indicator).
1 flash = Scanning (~2sec between flashes; wrong model if never stops).
2 flash = Brownout (receiver voltage went too low; check battery/servo load).
6. FAILSAFE:
Outputs are not driven (do nothing) on startup and while scanning.
Outputs 'hold' on short signal losses (<1sec) and then do nothing (>1s).
7. BINDING:
1. Switch Rx on and wait ~20s until led flickers fast.
2. Switch Tx on in bind mode and Rx led should flash slowly and then go solid.
3. Change distance between Tx/Rx if binding does not work.